
Project I Have Made with Group
A clear, concise overview highlighting the essence of your work
LFR Based Food Serving Waiter
Abstract
In modern restaurant automation, robotic systems are being used to improve efficiency and service quality. Our project, LFR-based Food Serving Waiter, is designed to autonomously deliver food to customers using a Line Follower Robot (LFR) mechanism. We have used these components for our project:
•STM32 Microcontroller
•DC Motor
•IR Sensor
•Motor Driver
•Jumper Wires
•Wheels
For Code Explanation, Download the PPT File Here: Download

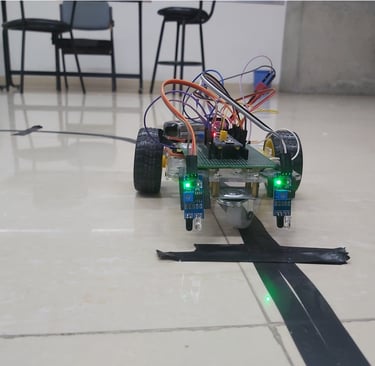
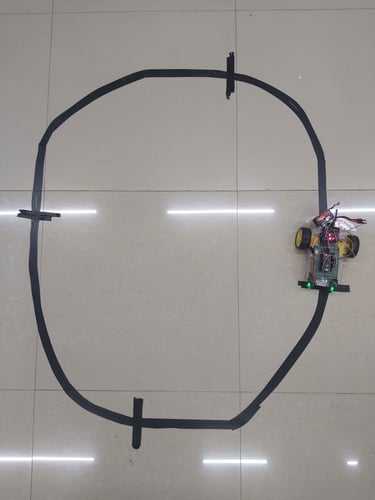
The LFR (Line Following Robot) Based Food Serving Waiter is designed to automate the process of serving food from one table to another using a predefined path. The system operates based on line-following principles, where sensors detect a marked path on the floor and guide the robot’s movement accordingly.
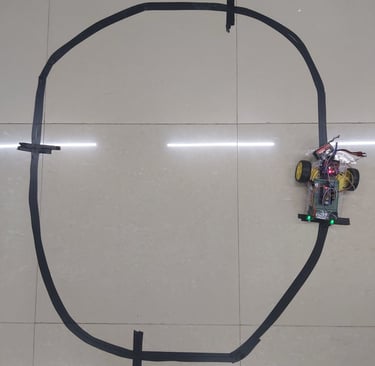
Initially, the robot is loaded with food and starts moving along the designated path toward the assigned tables. Using its line-following sensors, it navigates accurately without human intervention. When the robot reaches a specific table, it stops for a fixed duration of approximately 5 minutes, allowing customers to receive their food.
After the serving time is completed, the robot resumes its movement and proceeds to the next table following the same path. This cycle continues until all designated tables are served. The system ensures smooth and efficient operation by combining sensor-based navigation, timed stopping mechanisms, and controlled motor movement.
Overall, the project demonstrates how automation and embedded systems can be applied to improve service efficiency and reduce manual workload in environments like restaurants.
To watch the final demonstration, click here